Pesquisa, Desenvolvimento e Inovação no IFSP

O LCAA representa o espaço utilizado pelos membros do GPCAA (Grupo de Pesquisa em Computação Aplicada à Automação) no IFSP câmpus Votuporanga. Estes espaço foi idealizado e fundado em 2012 para a realização de Pesquisas, Desenvolvimentos e Inovações (PD&I) envolvendo software em automações e vem sendo equipado ao longo dos anos com ferramentas e materiais para realização de trabalhos envolvendo computação e eletrônica básica.
O GPCAA conta com a atuação dos seguintes professores/pesquisadores:
– Prof. Dr. Osvandre Alves Martins ![]()
– Prof. Dr. Natal Henrique Cordeiro ![]()
– Prof. Me. Ricardo Cesar de Carvalho ![]()
– Prof. Dr. Rafael Garcia L. Miani ![]()

Áreas de Interesse:
– Arquitetura de Sistemas
– Integração de Sistemas e Tecnologias
– Internet das Coisas
– Robótica Aplicada
– Domótica
– Tecnologias de Impressão 3D
– Inteligência Artificial aplicada
– Sistemas Embarcados e de Tempo Real
– Simulação Computacional
– Tecnologias e Sistemas de Informação (Redes de Computação, Sistemas de Gestão e Sistemas Supervisórios)
Projetos de pesquisa em nível de Iniciação Científica, sob responsabilidade do prof. Osvandre
> Sistemas de Informação e Automação em Drones aplicáveis à Agricultura

Iniciativas de desenvolvimento de automações e sistemas de informação integrando drones em diversas aplicações na agricultura, principalmente dispersão de agentes biológicos.

> Projeto MedIA – Sistemas de Informação e de Automação com Inteligência Artificial aplicáveis ao controle de ambientes hospitalares
Pesquisa, Desenvolvimento e Inovação em soluções aplicáveis ao controle de permanência, operações e frequência de pessoas em ambientes hospitalares, evitando infecções nosocomiais.
> Projeto SiDAI (Sistema de Detecção e Alarme de Incêndios)
![]()
Iniciativa com apoio de empresa do setor produtivo local (Previne Incêndio) voltada à concepção e desenvolvimentos de um sistema modular, baseado em padrões abertos, tecnologias de comunicação sem fio com baixo consumo de energia e características associadas a Internet das Coisas e DIY (Do-it-Yourself).
— Fase I (2021) – Concepção e elaboração (desenho) da solução tecnológica completa, definido uma base sólida para outros trabalhos de PD&I específicos e destinados a projetar a implementar dispositivos específicos na forma de sensores integrados, dispositivos de comunicação sem fio e com baixo consumo de energia e unidades de processamentos de dados e de monitoramento.
> Projeto QualiVNH – Sistema de Automação e de Informações para Controle de Qualidade de Válvulas Neurológicas para Hidrocefalia)

Iniciativa com apoio de empresa do setor produtivo local (Ventura Biomédica) voltada a conceber um conjunto de soluções tecnológicas integradas e na forma de sistema de automação e de informação, capaz de oferecer suporte à aplicação da norma ISO 7197 (Neurosurgical implants – Sterile, single-use hydrocephalus shunts and components).
— Fase III (2021/2022) – Evolução de protótipos do DQV-PV (Dispositivo de Verificação da Qualidade de VNH – Pressão versus Vazão). Ação de extensão envolvendo iniciação de discente ao trabalho em departamento de PD&I da empresa Ventura Biomédica.
— Fase II (2020/2021) – Evolução da elaboração (desenho da solução em hardware e software integrados) e construção (prototipagens) do DQV-PV (Dispositivo de Verificação da Qualidade de VNH – Pressão versus Vazão). Por de ações de pesquisa e desenvolvimento, foca na leitura de sensor de aplicação em instrumentação médica, condicionamento adequado de seus sinais elétricos, armazenamento, processamento e comunicação de séries de dados de ensaios de pressão em função da vazão mediante o emprego de VNH em Sistema de Derivação Peritoneal.
— Fase I (2017/2018) – Primeiras iterações de desenvolvimento envolvendo concepção da solução e estudos para desenvolvimento de partes do sistema de informações (SAU-BTH – Sistema para Aumento da Usabilidade de Bancadas de Testes Hidrodinâmicos) e do primeiro dispositivo responsável por automatizar o registros de dados em ensaios de Válvulas Neurológicas para Hidrocefalia (VNH) quanto a características de pressão em função da vazão (DVQ-PV – Dispositivo de Verificação da Qualidade de VNH – Pressão versus Vazão).
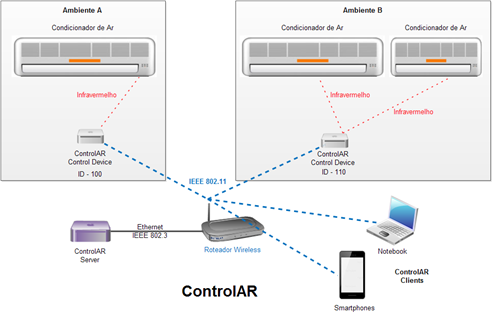
> ControlAR – Uma solução tecnológica para controle de condicionadores de ar a partir de dispositivos em redes de computadores.

Esta iniciativa visa o desenvolvimento de uma solução em hardware específico e softwares embarcados que possibilite o controle de aparelhos de ar condicionado do tipos Split, independente de suas marcas, modelos e de seus respectivos dispositivos de controle remoto. O sistema prevê o controle individual ou em grupo, considerando os diversos ambientes de uma unidade organizacional, a partir de um painel de controle acessível por computadores pessoais ou dispositivos móveis.
— Fase III (2021) – Foco na evolução dos dispositivos projetados para transmitir comandos aos condicionadores de ar nos ambientes em que eles se encontram posicionados, quando comandados por operador a partir do painel de controle ou mediante tarefa programada em agendar para comando automático. A iniciativa, mais uma vez é apoiada pelo IFSP e o CNPq, conferindo bolsa de Iniciação ao Desenvolvimento Tecnológico e Inovação a discente do curso de Engenharia Elétrica, pelo programa PIBITI. Os trabalhos se concentram em melhorias do projeto de hardware e de software embarcados
— Fase II (2018 e 2019) – Foco na evolução das especificações e desenhos da solução, principalmente das porções referentes ao sistema de informações projetado para possibilitar a administração do sistema e a operação remota dos condicionadores de ar. Em 2018 realizou-se Iniciação ao Desenvolvimento Tecnológico e Inovação de discente, pelo programa PIBITI, suportado pelo CNPq. As atividades continuaram em 2019, culminando em Trabalho de Conclusão do Curso de Tecnologia em Análise e Desenvolvimento de Sistemas. Como principais resultados citam-se: melhorias nas especificações e modelagens, inclusive de bancos de dados, bem como nas interfaces de usuário, com atenção a questões de usabilidade da solução.
— Fase I (2017) – Foco na especificação e elaboração (desenho) da solução, incluindo prototipagens para provas de conceito. As atividades resultaram em Trabalho de Conclusão do Curso Técnico em Informática Integrado ao Ensino Médio.
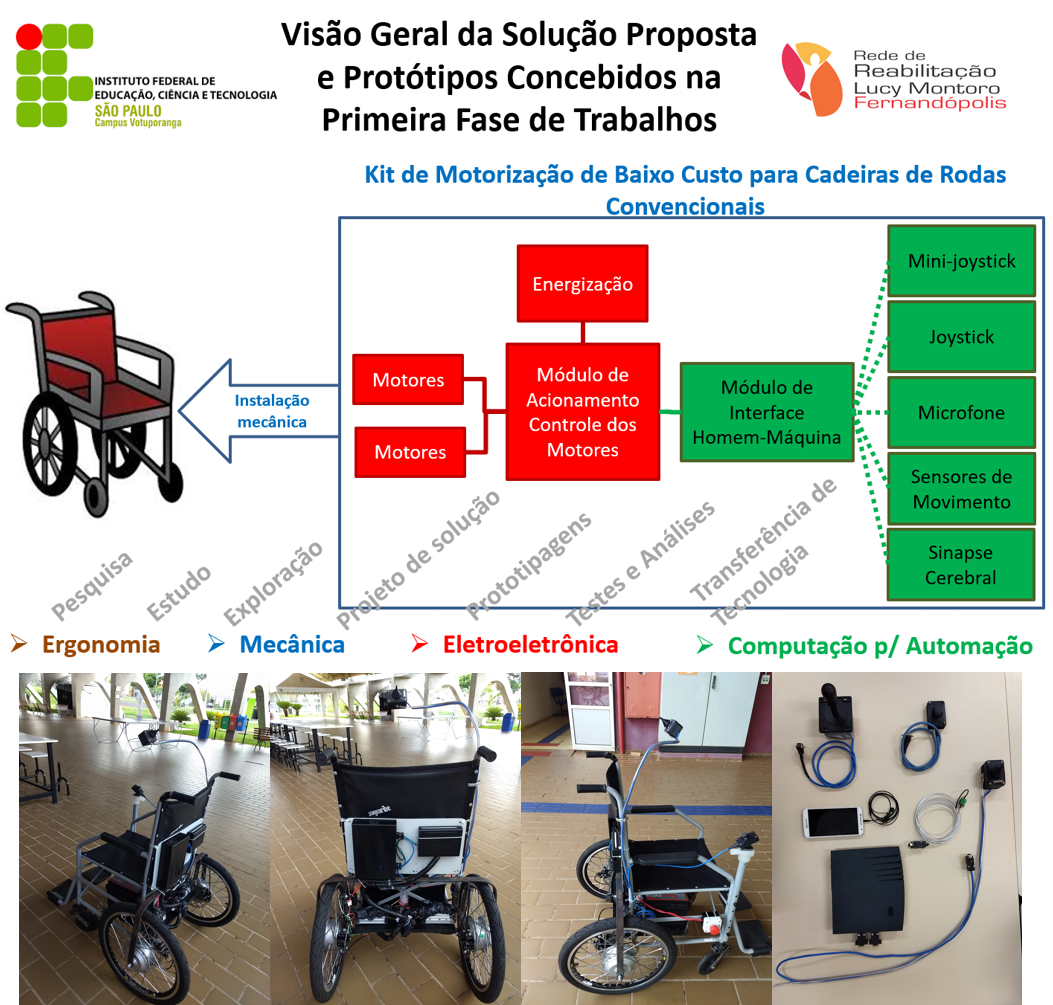
> Módulo de Interface Homem-Máquina de Kit de Motorização para Cadeiras de Rodas Convencionais
Projeto desenvolvido com apoio da Unidade de Reabilitação Lucy Montoro e com a Associação de Moradores do Município de Fernandópolis para criação e desenvolvimento de um kit de motorização de baixo custo para cadeiras de rodas convencionais. Iniciativa multidisciplinar envolvendo outras equipes responsáveis por partes distintas da solução pretendida.
Os trabalhos encontram-se suspensos podendo ser retomados mediante disponibilidade de atuação do professor e de bolsista.
> Projeto SINAR (um SIstema de Navegação para Robôs)
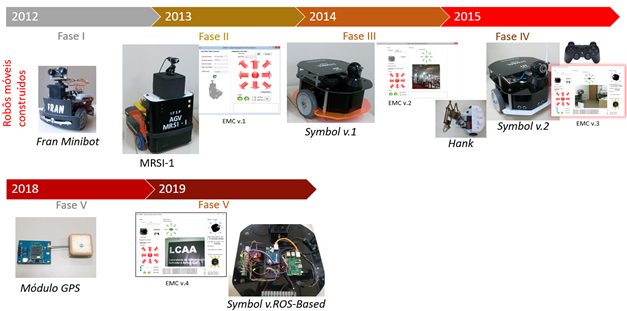
Sistema de cunho acadêmico, em Hardware e Software, para controle de robôs móveis. É utilizado como tema para iniciações científicas correlatas, sucessivas, complementares e evolutivas. Várias plataformas robóticas foram desenvolvidas e algumas vêm sendo evoluídas, oferecendo suporte aos trabalhos. A imagem a seguir ilustra o surgimento das plataformas, mediante as construções e evoluções.
Os trabalhos encontram-se suspensos podendo ser retomados mediante disponibilidade de atuação do professor e de bolsista.
– -Fase V (2018 e 2019)
— Estudos para integração de Módulo GPS à plataforma Symbol.
— Desenvolvimento de versão dos softwares embarcados com base no framework ROS (Robot Operating System).
— Software da Estação de Monitoramento e Controle (EMC) versão 4.0.
— Software embarcado para navegação – Versão ROS-Based – Identifição de Símbolos / QRCodes (Raspiberry Pi 3).
Obs: A versão atual do SINAR possibilita guiamento assistido (por operador) e possui recursos uteis à implementação de guiamento autônomo como detecção de obstáculos, obtenção de proa corrente conforme bússola, leitura e cumprimento de comandos de movimento em QRCodes. A implementação de guiamento autônomo efetivo representa desafio para as próximas fases de trabalho.
– -Fase IV (2015)
— Evolução e aprimoramento da plataforma Symbol (v2);
— Integração de sensor Magnetômetro e implementação de bússola, possibilitando conhecer a Proa corrente do robô, em relação ao norte megnético;
— Integração de controlador de games (Joystick) para navegação assistida.
— Software embarcado para navegação por Visão Computacional – Versão 3.0 – Identificação de Símbolos (Raspiberry Pi 3).
— Desenvolvimento da Plataforma Robótica experimental Hank que inclui atuador na forma de garra (aplicada em estudos de aplicação de robôs em logística).
– -Fase III (2014)
— Elaboração e construção da plataforma Symbol (v1);
— Software embarcado para navegação por Visão Computacional – Versão 3.0 – Identificação de Símbolos (PCDuino);
— Software de Estação Controle e Monitoramento – Versão 3.0 – Visualização da visão do robô, em tempo real (Visual C++);
— Software de controle de movimentação robótica e integração de sensores para navegação – Versão 3.0 – Melhorias (Arduino e sensores de distância Infravermelho e Ultrassônico);
— Comunicação em rede por meio de conexão Socket UDP Wireless; e
— Investigação inicial para emprego do ROS (Robot Operating System).
– – Fase II (2013)
— Elaboração e construção da plataforma Fran Minibot;
— Software embarcado para navegação por Visão Computacional – Versão 2.0 – Melhorias (Raspiberry Pi).
— Software de Estação Controle e Monitoramento – Versão 2.0 (Visual C++);
— Software de controle de movimentação robótica e integração de sensores para navegação – Versão 2.0 – Melhorias (Arduino e sensores de distância Infravermelho e Ultrassônico); e
— Comunicação em rede por meio de conexão Serial (Bluetooth) e Socket UDP.
– – Fase I (2012)
— Elaboração e construção da plataforma robótica MRSI-1 (Mobile Robot from Stuff and Imagination – One);
— Software embarcado para navegação por Visão Computacional – Versão 1.0 – Identificação de Cor;
— Software de Estação Controle e Monitoramento – Versão 1.0 (Java);
— Software de controle de movimentação robótica e integração de sensores para navegação – Versão 1 (Arduino e sensores de distância Infravermelho e Ultrassônico); e
— Comunicação em rede por meio de conexão Serial (Bluetooth) e Socket UDP.
> Projeto ENDU (Sistema de Telepresença para Pessoas Portadoras de Necessidades Específicas no Ambiente Escolar a partir de Robô Móvel)
Sistema de cunho acadêmico, em Hardware e Software, envolvendo Tecnologias da Informação e Comunicação e Robô Móvel voltado a possibilitar a telepresença de pessoas portadoras de necessidades específicas no ambiente escolar. Uma iteração de análise e projeto deste sistema foi realizada em 2017. Há intensão de aproveitar os desenvolvimentos do SINAR, bem como da plataforma robótica Symbol do projeto SINAR.
Os trabalhos encontram-se suspensos podendo ser retomados mediante disponibilidade de atuação do professor e de bolsista.
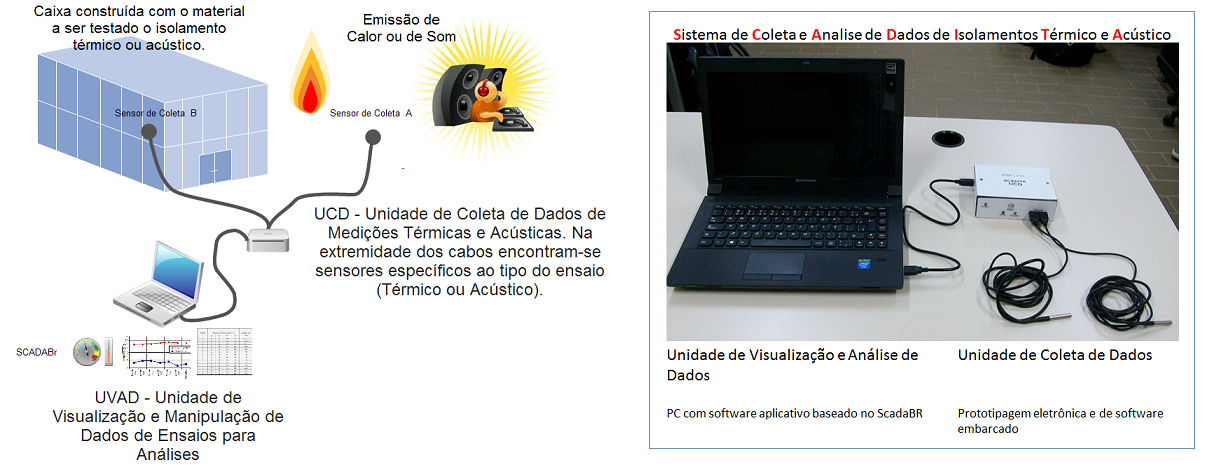
> SCADITA: Solução Tecnológica de Suporte à Coleta de Dados e Análises de Isolamento Térmico e de Isolamento Acústico na Construção Civil (2014)
Especificação, projeto e prototipagem do SCADITA (Sistema de Coleta e Análise de Dados de Isolamento Térmico e Acústico), uma solução em hardware e software específicos, baseada em Sistemas Supervisório, voltada a facilitar trabalhos de Pesquisa, Desenvolvimento e Inovação na área de Construção Civil e quanto a novos materiais com possível aplicação em superfícies, possibilitando análises qualitativas de níveis de isolamento térmico e acústico destes materiais.
Os trabalhos encontram-se suspensos podendo ser retomados mediante disponibilidade de atuação do professor e de bolsista.
